How to construct an acceleration projection. Uniform linear movement
To perform calculations of velocities and accelerations, it is necessary to move from writing equations in vector form to writing equations in algebraic form.
Initial velocity and acceleration vectors  may have different directions, so the transition from a vector representation of equations to an algebraic one can be very labor-intensive.
may have different directions, so the transition from a vector representation of equations to an algebraic one can be very labor-intensive.
It is known that the projection of the sum of two vectors onto any coordinate axis is equal to the sum of the projections of the summands of the vectors onto the same axis.
|
|
Therefore, to find the projection
The projection of a vector onto an axis is considered positive if it is necessary to go from the projection of the beginning to the projection of the end of the vector in the direction of the axis, and negative in the opposite case. |
|
|

 velocity vector
velocity vector  on an arbitrary axis OX you need to find the algebraic sum of projections of vectors
on an arbitrary axis OX you need to find the algebraic sum of projections of vectors  And
And  on the same axis.
on the same axis.

Speed graph
From Eq.  it follows that the graph of the projection of the speed of uniformly accelerated motion versus time is a straight line. If the projection of the initial velocity onto the OX axis is zero, then the straight line passes through the origin.
it follows that the graph of the projection of the speed of uniformly accelerated motion versus time is a straight line. If the projection of the initial velocity onto the OX axis is zero, then the straight line passes through the origin.
|
|
|


Main types of movement
A n = 0, a = 0 – rectilinear uniform motion;
A n = 0, a = const– rectilinear uniform motion;
A n = 0, a 0 – rectilinear with variable acceleration;
A n = const, a = 0 – uniform around the circumference
A n = const, a = const– uniformly variable around the circumference
A n const, a const– curvilinear with variable acceleration.
Rotational motion of a rigid body.
Rotational motion of a rigid body relative to a fixed axis - a movement in which all points of a rigid body describe circles whose centers lie on the same straight line, called axis of rotation.
Uniform movement around a circle
Let's consider the simplest type of rotational motion, and pay special attention to centripetal acceleration.
With uniform motion in a circle, the speed value remains constant, and the direction of the speed vector  changes during movement.
changes during movement.
|
|
Over time interval ∆
t the body goes through the journey |
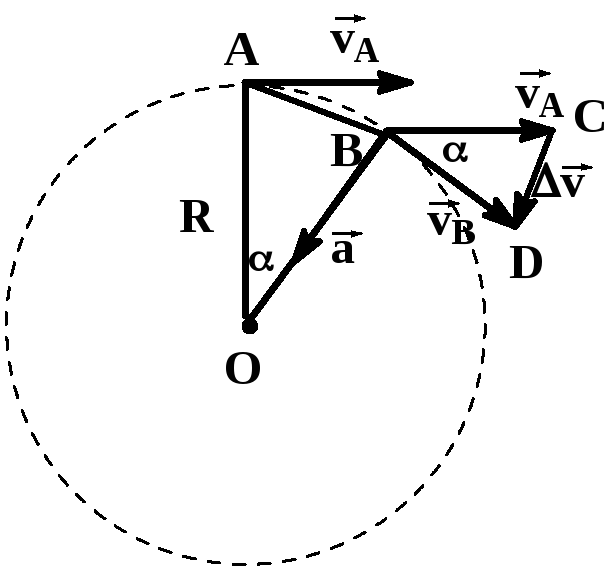
 . This path is equal to the arc length AB. Velocity vectors
. This path is equal to the arc length AB. Velocity vectors  And
And  at points A And B are directed tangent to the circle at these points, and the angle
between vectors
at points A And B are directed tangent to the circle at these points, and the angle
between vectors  And
And  equal to the angle between the radii O.A. And O.B. Let's find the vector difference
equal to the angle between the radii O.A. And O.B. Let's find the vector difference  and determine the ratio of the change in speed to ∆
t:
and determine the ratio of the change in speed to ∆
t:
From the similarity of triangles OAB and BCD it follows

If the time interval ∆t is small, then the angle is also small. At small values of the angle , the length of the chord AB is approximately equal to the length of the arc AB, i.e.  . Because
. Because  ,
, , then we get
, then we get

 .
.
Since  , then we get
, then we get

Period and frequency
The period of time during which a body makes a complete revolution when moving in a circle is called circulation periods (T). Because circumference is equal to 2 R, the period of revolution for uniform motion of a body with speed v in a circle of radius R equals:

The reciprocal of the period of revolution is called frequency. Frequency shows how many revolutions a body makes in a circle per unit time:
 (s -1)
(s -1)
Uniform movement– this is movement at a constant speed, that is, when the speed does not change (v = const) and acceleration or deceleration does not occur (a = 0).
Straight-line movement- this is movement in a straight line, that is, the trajectory of rectilinear movement is a straight line.
Uniform linear movement- this is a movement in which a body makes equal movements over any equal periods of time. For example, if we divide a certain time interval into one-second intervals, then with uniform motion the body will move the same distance for each of these time intervals.
The speed of uniform rectilinear motion does not depend on time and at each point of the trajectory is directed in the same way as the movement of the body. That is, the displacement vector coincides in direction with the velocity vector. In this case, the average speed for any period of time is equal to the instantaneous speed:
V cp = v
Distance traveled in linear motion is equal to the displacement module. If the positive direction of the OX axis coincides with the direction of movement, then the projection of the velocity onto the OX axis is equal to the magnitude of the velocity and is positive:
V x = v, that is v > 0
The projection of displacement onto the OX axis is equal to:
S = vt = x – x 0
where x 0 is the initial coordinate of the body, x is the final coordinate of the body (or the coordinate of the body at any time)
Equation of motion, that is, the dependence of the body coordinates on time x = x(t), takes the form:
X = x 0 + vt
If the positive direction of the OX axis is opposite to the direction of motion of the body, then the projection of the body’s velocity onto the OX axis is negative, the speed is less than zero (v< 0), и тогда уравнение движения принимает вид:
X = x 0 - vt
Dependence of speed, coordinates and path on time
The dependence of the projection of the body velocity on time is shown in Fig. 1.11. Since the speed is constant (v = const), the speed graph is a straight line parallel to the time axis Ot.
 Rice. 1.11. Dependence of the projection of body velocity on time for uniform rectilinear motion.
Rice. 1.11. Dependence of the projection of body velocity on time for uniform rectilinear motion.
The projection of movement onto the coordinate axis is numerically equal to the area of the rectangle OABC (Fig. 1.12), since the magnitude of the movement vector is equal to the product of the velocity vector and the time during which the movement was made.
 Rice. 1.12. Dependence of the projection of body displacement on time for uniform rectilinear motion.
Rice. 1.12. Dependence of the projection of body displacement on time for uniform rectilinear motion.
A graph of displacement versus time is shown in Fig. 1.13. The graph shows that the projection of the velocity is equal to
V = s 1 / t 1 = tan α
where α is the angle of inclination of the graph to the time axis. The greater the angle α, the faster the body moves, that is, the greater its speed (the greater the distance the body travels in less time). The tangent of the tangent to the graph of the coordinate versus time is equal to the speed:
Tg α = v
 Rice. 1.13. Dependence of the projection of body displacement on time for uniform rectilinear motion.
Rice. 1.13. Dependence of the projection of body displacement on time for uniform rectilinear motion.
The dependence of the coordinate on time is shown in Fig. 1.14. From the figure it is clear that
Tg α 1 > tg α 2
therefore, the speed of body 1 is higher than the speed of body 2 (v 1 > v 2).
Tg α 3 = v 3< 0
If the body is at rest, then the coordinate graph is a straight line parallel to the time axis, that is
X = x 0
 Rice. 1.14. Dependence of body coordinates on time for uniform rectilinear motion.
Rice. 1.14. Dependence of body coordinates on time for uniform rectilinear motion.
Graphs make it possible to visualize the dependence of speed and acceleration on time when a body (point) moves.
Modulus and acceleration projection graphs
If a point moves with constant acceleration, then the graphs of the module and projection of acceleration will be straight lines, parallel to the time axis. It must be remembered that the modulus is a non-negative quantity, therefore the graph of the acceleration modulus cannot be located below the time axis (Fig. 1.50). Acceleration projections can have positive and negative values (Fig. 1.51, a, b). Figure 1.51, b shows that the acceleration is constant and directed opposite to the X axis.
Rice. 1.50
O
From the graph of the acceleration projection, you can find, in addition to ah, the change in the velocity projection. It is numerically equal to the area of the rectangle OABC or OKMN, since Avx = axt, and axt is numerically equal to the area of the rectangle OABC or OKMN.
The area is taken with a minus sign if it is located below the time axis, which corresponds to Figure 1.51, b, where Avx = axt
Velocity projection formulas (1.17.3) are linear functions of time. Therefore, the graphs of the modulus and velocity projections are straight lines. Figure 1.52 shows graphs of the velocity modulus versus time for three movements with constant acceleration. Graphs 2 and 3 correspond to movements whose initial velocity modules correspond to segments OA and OB. Graph 1 corresponds to movement with a uniformly increasing velocity module and an initial speed equal to zero. Graph 3 corresponds to movement with a velocity modulus uniformly decreasing to zero. The OS segment is numerically equal to the time the point moves until it stops. Rice. 1.52
Speed Projection Graph
Velocity module graphs contain /1
O
They contain less information than velocity projection graphs, since the first graphs cannot be used to judge the direction of movement relative to the coordinate axes.
Rice. 1.53
Figure 1.53 shows graphs 1 and 2 of the velocity projections of two points. Both of them have an initial speed of zero. The first point moves to
in the positive direction of the X axis, and since Avx > 0, then a1x > 0. The second point moves opposite to the X axis, since Avx Figure 1.54 also shows graphs 1, 2 of the velocity projections of two points. Both of them have the same value of the projection of the initial velocity, corresponding to the segment OA. According to graph 1, the point moves in the positive direction of the X axis, and the magnitude and projection of the velocity uniformly increase.
According to graph 2 (see Fig. 1.54), the point for a certain period of time (segment OB) moves in the positive direction of the X axis (vx > 0) with the velocity projection value uniformly decreasing to zero (stop). After this, the velocity projection becomes negative; this means that the point began to move in the direction opposite to the positive direction of the X axis. In this case, the velocity projection modulo, and hence the velocity modulus, uniformly increases. The acceleration projection of a point is negative. Since the projection of the point’s velocity uniformly decreases, the projection of the acceleration remains constant. Therefore, the point moves with constant acceleration.
The graphs of speed and acceleration versus time at constant acceleration are quite simple. The main thing here is to get used to the image of positive and negative quantities and not to confuse the graphs of modules and projections.
? 1. Show that the angle of inclination of the velocity projection graph to the time axis is greater, the greater the acceleration projection modulus, i.e., the acceleration projection is the angular coefficient of the straight line.
2. Figure 1.55 shows graphs 1 and 2 of the velocity projections of two points. Prove that the graphs correspond to motion with acceleration that does not change both in magnitude and direction.? Rice. 1.54 Fig. 1.55
How does the speed of a point change, the graph of the projection of its speed as a function of time is shown by line 1 (see Fig. 1.55)? What do the segments OC and OX> correspond to?
How did the speed of the point change (see graph 2 in Figure 1.55)? What does the OS segment correspond to? Where is the acceleration of a point directed relative to the XI axis?
In drawings, images of geometric bodies are constructed using the projection method. But for this one image is not enough; at least two projections are needed. With their help, points in space are determined. Therefore, you need to know how to find the projection of a point.
Projection of a point
To do this, you will need to consider the space of the dihedral angle, with the point (A) located inside. Here the horizontal P1 and vertical P2 projection planes are used. Point (A) is projected orthogonally onto the projection planes. As for the perpendicular projection rays, they are combined into a projection plane perpendicular to the projection planes. Thus, when combining the horizontal P1 and frontal P2 planes by rotating along the P2 / P1 axis, we obtain a flat drawing.
Then a line with projection points located on it is shown perpendicular to the axis. This creates a complex drawing. Thanks to the constructed segments on it and the vertical connection line, you can easily determine the position of the point relative to the projection planes.
To make it easier to understand how to find the projection, you need to consider a right triangle. Its short side is the leg, and its long side is the hypotenuse. If you project a leg onto the hypotenuse, it will be divided into two segments. To determine their value, you need to calculate a set of initial data. Let us consider on this triangle how to calculate the main projections.
As a rule, in this problem they indicate the length of the leg N and the length of the hypotenuse D, whose projection is required to be found. To do this, we will find out how to find the projection of the leg.
Let's consider a method for finding the length of the leg (A). Considering that the geometric mean of the projection of the leg and the length of the hypotenuse is equal to the value of the leg we are looking for: N = √(D*Nd).
How to find the projection length
The root of the product can be found by squaring the length of the desired leg (N), and then dividing it by the length of the hypotenuse: Nd = (N / √ D)² = N² / D. When specifying the values of only legs D and N in the source data, the length projections should be found using the Pythagorean theorem.
Let's find the length of the hypotenuse D. To do this, you need to use the values of the legs √ (N² + T²), and then substitute the resulting value into the following formula for finding the projection: Nd = N² / √ (N² + T²).
When the source data contains data on the length of the projection of the leg RD, as well as data on the value of the hypotenuse D, the length of the projection of the second leg ND should be calculated using a simple subtraction formula: ND = D – RD.
Projection of speed
Let's look at how to find the projection of velocity. In order for a given vector to represent a description of motion, it should be placed in projection onto the coordinate axes. There is one coordinate axis (ray), two coordinate axes (plane) and three coordinate axes (space). When finding a projection, it is necessary to lower perpendiculars from the ends of the vector onto the axis.
In order to understand the meaning of projection, you need to know how to find the projection of a vector.
Vector projection
When the body moves perpendicular to the axis, the projection will be represented as a point and have a value equal to zero. If the movement is carried out parallel to the coordinate axis, then the projection will coincide with the vector module. In the case when the body moves in such a way that the velocity vector is directed at an angle φ relative to the (x) axis, the projection onto this axis will be a segment: V(x) = V cos(φ), where V is the model of the velocity vector. When the directions of the velocity vector and the coordinate axis coincide, then the projection is positive, and vice versa.
Let's take the following coordinate equation: x = x(t), y = y(t), z = z(t). In this case, the speed function will be projected onto three axes and will have the following form: V(x) = dx / dt = x"(t), V(y) = dy / dt = y"(t), V(z) = dz / dt = z"(t). It follows that to find the speed it is necessary to take derivatives. The speed vector itself is expressed by an equation of the following form: V = V(x) i + V(y) j + V(z) k . Here i, j, k are the unit vectors of the x, y, z coordinate axes, respectively. Thus, the velocity module is calculated by the following formula: V = √ (V(x) ^ 2 + V(y) ^ 2 + V(z). )^2).
Uniform movement– this is movement at a constant speed, that is, when the speed does not change (v = const) and acceleration or deceleration does not occur (a = 0).
Straight-line movement- this is movement in a straight line, that is, the trajectory of rectilinear movement is a straight line.
Uniform linear movement- this is a movement in which a body makes equal movements over any equal periods of time. For example, if we divide a certain time interval into one-second intervals, then with uniform motion the body will move the same distance for each of these time intervals.
The speed of uniform rectilinear motion does not depend on time and at each point of the trajectory is directed in the same way as the movement of the body. That is, the displacement vector coincides in direction with the velocity vector. In this case, the average speed for any period of time is equal to the instantaneous speed: v cp = v Speed of uniform rectilinear motion is a physical vector quantity equal to the ratio of the movement of a body over any period of time to the value of this interval t:
Thus, the speed of uniform rectilinear motion shows how much movement a material point makes per unit time.
Moving with uniform linear motion is determined by the formula:
Distance traveled in linear motion is equal to the displacement module. If the positive direction of the OX axis coincides with the direction of movement, then the projection of the velocity onto the OX axis is equal to the magnitude of the velocity and is positive:
V x = v, that is, v > 0 The projection of displacement onto the OX axis is equal to: s = vt = x – x 0 where x 0 is the initial coordinate of the body, x is the final coordinate of the body (or the coordinate of the body at any time)
Equation of motion, that is, the dependence of the body coordinates on time x = x(t), takes the form:
X = x 0 + vt If the positive direction of the OX axis is opposite to the direction of motion of the body, then the projection of the body’s velocity onto the OX axis is negative, the speed is less than zero (v x = x 0 - vt
Dependence of speed, coordinates and path on time
The dependence of the projection of the body velocity on time is shown in Fig. 1.11. Since the speed is constant (v = const), the speed graph is a straight line parallel to the time axis Ot.
Rice. 1.11. Dependence of the projection of body velocity on time for uniform rectilinear motion.
The projection of movement onto the coordinate axis is numerically equal to the area of the rectangle OABC (Fig. 1.12), since the magnitude of the movement vector is equal to the product of the velocity vector and the time during which the movement was made.
Rice. 1.12. Dependence of the projection of body displacement on time for uniform rectilinear motion.
A graph of displacement versus time is shown in Fig. 1.13. The graph shows that the projection of the velocity is equal to
V = s 1 / t 1 = tan α where α is the angle of inclination of the graph to the time axis. The larger the angle α, the faster the body moves, that is, the greater its speed (the longer the body travels in less time). The tangent of the tangent to the graph of the coordinate versus time is equal to the speed: tg α = v
Rice. 1.13. Dependence of the projection of body displacement on time for uniform rectilinear motion.
The dependence of the coordinate on time is shown in Fig. 1.14. From the figure it is clear that
Tg α 1 > tan α 2 therefore, the speed of body 1 is higher than the speed of body 2 (v 1 > v 2). tg α 3 = v 3 If the body is at rest, then the coordinate graph is a straight line parallel to the time axis, that is, x = x 0
Rice. 1.14. Dependence of body coordinates on time for uniform rectilinear motion.